1.引言
随着城市建设的快速发展,城市发展逐渐向机场区域倾斜、高层建筑也不断增多,时有建筑物或设施侵犯净空甚至挑战飞行区安全以至于黑天停止航空服务的事件发生,这就使得机场净空的保护形势变得十分严峻。同时净空区域内建筑物高度的要求对城市规划也起到非常重要的作用。可见,做好净空管理不仅关系着机场飞行区的安全,对机场所在地政府、民众和机场当局都有重大的利害关系,是建设主管部门和机场当局一项非常重要的日常工作。
而传统的机场净空评价方法是调查和测定机场净空区域内障碍物的位置和高度,然后绘制出机场净空限制面及障碍物位置图,再根据
三角关系计算物体高度是否超过限制高度,这种方式速度慢、精度低,同时这个工作的责任也是非常重大,由于没有一种方便可靠地评价手段和工具,无论是现场巡查还是与地方规划及相关部门工作衔接上都存在很多问题,已不能满足现实的需要。随着GPS定位技术的普及、手持终端的功能的强大,使得移动地理信息技术得以迅速发展,移动办公、位置服务越来越受到人们的关注,为机场净空系统的设计提供了新的思路。因此,与移动地理信息系统结合开发手持的移动净空评价终端是非常必要的。
2.机场净空模型计算
为了方便建立机场净空方程,准确表达机场障碍物限制面在几何空间中的位置,需要建立一个合理的坐标系作为基准系统,即机场净空评价坐标系。机场净空评价时,将障碍物的地理坐标通过坐标转换转为机场净空评价坐标
系统下的坐标进行相应计算,即可通过构建净空的数学模型,来达到净空评价计算的目的。
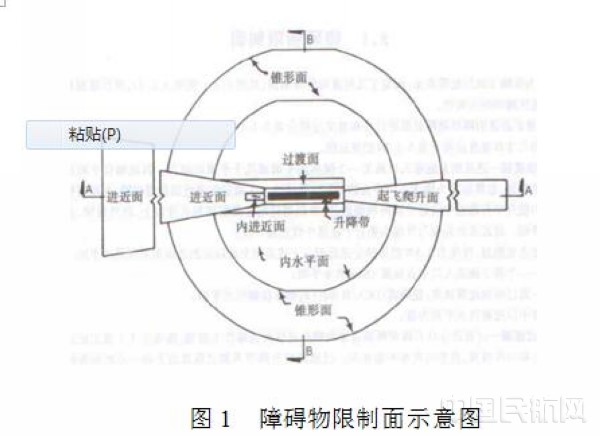
通过图1对障碍物限制面的描述,限制面存在对称关系,则本系统的机场净空评价坐标系统以跑道中心点为坐标原点,以跑道中心线所在的直线为X轴,正方向为起飞爬升面的方向,以跑道入口端端线及延长线为Y轴,依据右手定则,Z轴方向为垂直水平面向上。
2.1进近面计算
进近面是跑道入口前的一个倾斜的平面或者几个平面的组合。其起端位于跑道入口前规定距离处,起算标高为跑道中心点的标高。按照规定的进近面起端位置、起端宽度和两条侧边的散开率自跑道中线延长线向两侧散开,并以规定的各段坡度和长度向上、向外延伸,直到进近面的外端。进近面第一段方程为:
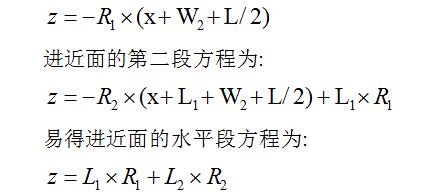
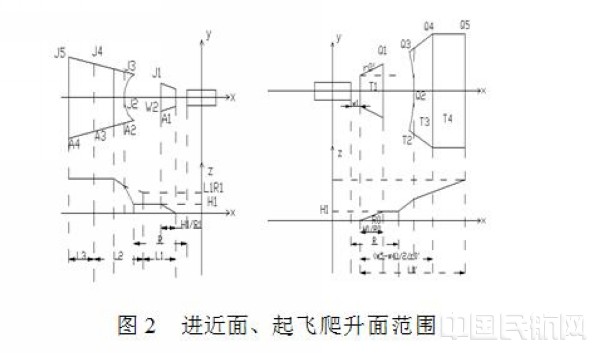
由图2可以看出,进近面与内水平面及锥形面有相交重叠的部分,而高程必须满足最低面的控制原理,在机场净空判断时,障碍物落在A1范围时则限制高度代入进近面的第一段方程进行计算,落在A4范围时代入进近面的水平段方程,其余两个范围时,代入进近面的第二段方程进行计算。
2.2起飞爬升面计算
起飞爬升面起端应位于跑道端外规定距离处或净空道末端,起端标高应等于跑道端至起飞爬升面起端之间的跑道中线延长线上的最高点标高,或当设有净空道时为净空道中线地面的最高点标高。
根据分析计算得出起飞爬升面的方程为

则起飞爬升面分为图2中T1、T2、T3、T4共四个范围,在这范围内则代入起飞爬升面的方程进行限制高度的计算。
2.3过渡面计算
过渡面应从升降带两侧边缘和部分进近面边缘作为起端,按照规定的坡度向上和向外倾斜,直至与内水平面相交。过渡面沿升降带两侧边缘底边上的每一点的起算标高应等于跑道中线或其延长线上距该点最近一点的标高;沿进近面两侧的过渡面底边上的每一点的起算标高应为进近面上该点的标高。
因为过渡面关于x轴是对称的,所以根据x轴上方方程就得到x轴下方的方程。

则过渡面划分为图中两个不同范围,且关于x轴对称,障碍物落在这两个范围内,代入过渡面的方程进行限制高度的计算。

2.4内水平面计算
内水平面的起算标高应为跑道两端入口中点的平均标高。以跑道两端入口中点为圆心,按照规定的内水平面半径画出圆弧,再以与跑道中线平行的两条直线与圆弧相切成一个近似椭圆形,形成一个起算标高高度的一个水平面。
根据内水平面的定义可限制高度为定值,是一个水平面, 

通过分析,把内水平面划分的区域如图I1、I2、I3、I4、I5、I6、I7不同范围,障碍物落入以上区域时,则限制高度为H1。
2.5锥形面计算
锥形面,锥形面的起端应从内水平面的周边开始,其起算标高应为内水平面的标高,以一定的坡度向上和向外倾斜,直到规定的锥形面外缘高度为止。
根据锥形体的顶点坐标,可以得出锥形面两端的方程为:

通过分析,把锥形面范围划分如图4。障碍物落入此范围时,代入锥形面的方程进行限制高度的计算。
3.系统总体设计与实现
3.1系统总体设计
本系统开发依据超图公司eSupermap的嵌入式GIS开发平台,它提供了专业的GIS应用,它功能全面、开发方式灵活、定制能力强、资源消耗低、运行效率高,是开发嵌入式GIS应用、GPS前端产品的理想选择。
eSupermp它以C++类库和.NET控件的方式进行分发,它支持Visual C++、eMbedded Visual C++、Visual Studio 2005和Visual Studio 2008等多种开发工具,本系统使用eSupermap的.NET控件,利用Visual Studio 2008开发工具进行开发。.
本系统的总体结构主要分为三个层次,分别为用户操作层、业务处理层、数据文件层。

(1) 用户操作层:该层是本系统的表现层,通过人机交互的形式,机场管理人员可以对待评价机场的跑道类型进行选择以及限制面参数进行输入,以机场电子地图为背景,利用GIS工具,为地图操作提供便捷方式,并动态显示净空评价信息。
(2) 业务处理层:该层是根据业务流程对管理人员的数据输入以及底层进行分析计算的过程,在业务处理层中,主要包括的业务流程有跑道类型及限制面参数的接收、核心净空计算流程、净空信息输出流程、地图的GIS操作,该层的业务流程也是本系统功能模块划分的依据。则本系统功能模块划分为文件管理模块、GIS基本功能模块、净空评价模块、GPS模块,核心功能是净空评价模块。
(3) 数据文件层:该层是整个系统的信息资源核心,主要包括以文件形式存储的电子地图基础数据、机场模型数据。其主要功能是获取地图中图层及数据源、数据集信息,供给业务层处理,并将结果更新到数据源中。
图2清晰的表示了系统的层次分解关系,相互之间信息流和控制流的传递关系,本系统的总体架构采用了层次化的设计思想,实现不同层次之间的相互独立,即低耦合的设计思想,保证系统高度稳定性、实用性和可扩展性,这也满足了对嵌入式设备上进行开发的要求。
3.2系统数据设计
eSupermap为了满足嵌入式系统开发资源紧缺的不足,提供了数据文件的存储形式,以便适合在嵌入式设备上使用,即PMF(Portable Map File)和PMR(Portable Map Runtime File)文件格式,这两种格式的数据文件紧凑、结构清晰、逻辑分明,最重要的是它不依赖与任何一种数据库,可移植性好,同时采用多数据源无缝集成技术通过数据引擎访问不同的数据文件。
在该净空评价系统中,通过eSupermap viewer转换工具实现对数据源的不同格式之间的转换,最终转换为满足eSupermap格式的数据文件,工作空间保存为PMW格式文件,数据源文件保存为PM2格式文件,以达到本系统合适的数据形式,故本系统所需的数据文件获取步骤如下:
(1) 通过eSupermap viewer转换工具将数据源转换为PM2形式;
(2) 加载机场.sit影像文件;
(3) 进行配准,得到本系统所需数据文件。
3.3系统实现
本节的主要内容是在以上分析设计基础上实现机场净空评价系统打包成CAB格式安装在PDA终端上进行最终测试。系统运行界面如下图:

4.结语
机场净空评价系统与移动GIS的结合是一个很好的研究方向,充分发挥了GIS的空间管理与数据分析能力,希望在不久的将来,在先进的理论分析与研究基础之上,能设计出更好的机场净空评价系统。(作者:徐军库、乔玉洁 中国民航网智库专家 中国民航机场建设集团公司科研基地,北京交通大学)
参考文献:
[1] 易巍,徐军库.基于GIS的机场多跑道三维净空管理系统的研究与开发[J].测绘科学,2010(1):177-180.
[2] 中国民用航空总局GB 9660-2006.民用机场飞行区技术标准[S].中国.中国民用航空总局.全文.
[3] 刘应朝.(地图学与地理信息系统专业优秀论文)机场净空分析的三维可视化及其算法研究[D].成都:成都理工大学.2009.全文.
[4] Schwartz C W, Rada G R, Witczak M W, Rabinow S D .GIS Application in Airfield PavementManagement[J]. Transportation Research Record, 1991, 267-276.
作者简介:徐军库 工学博士 教授级高工。中国航空运输协会专家咨询委员会成员。研究方向为机场数字化与信息化、绿色机场和机场可持续发展。



 返回首页
返回首页

